

GPS Denied Autonomous Drone
Custom quadcopter featuring a Pixhawk 2.4.8 and Jetson Nano, for autonomous flight in unknown terrain, for ISRO IRoC-U 2025 & 2026.
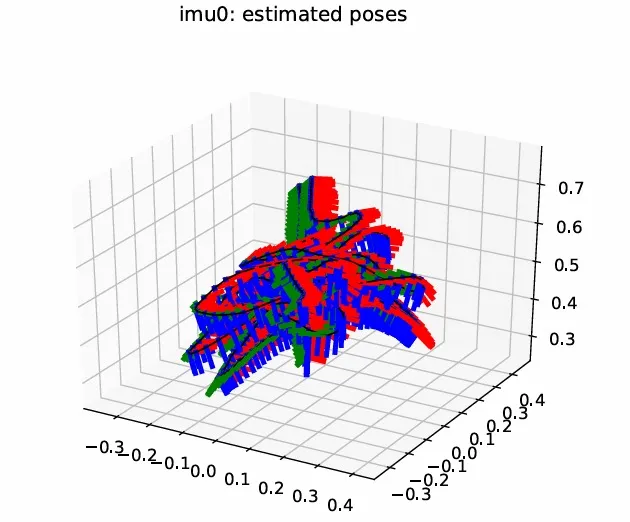
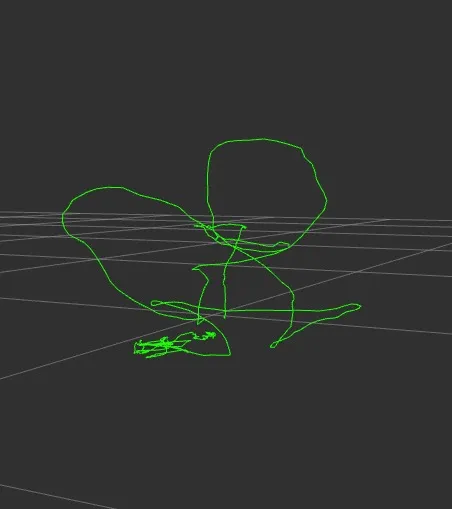
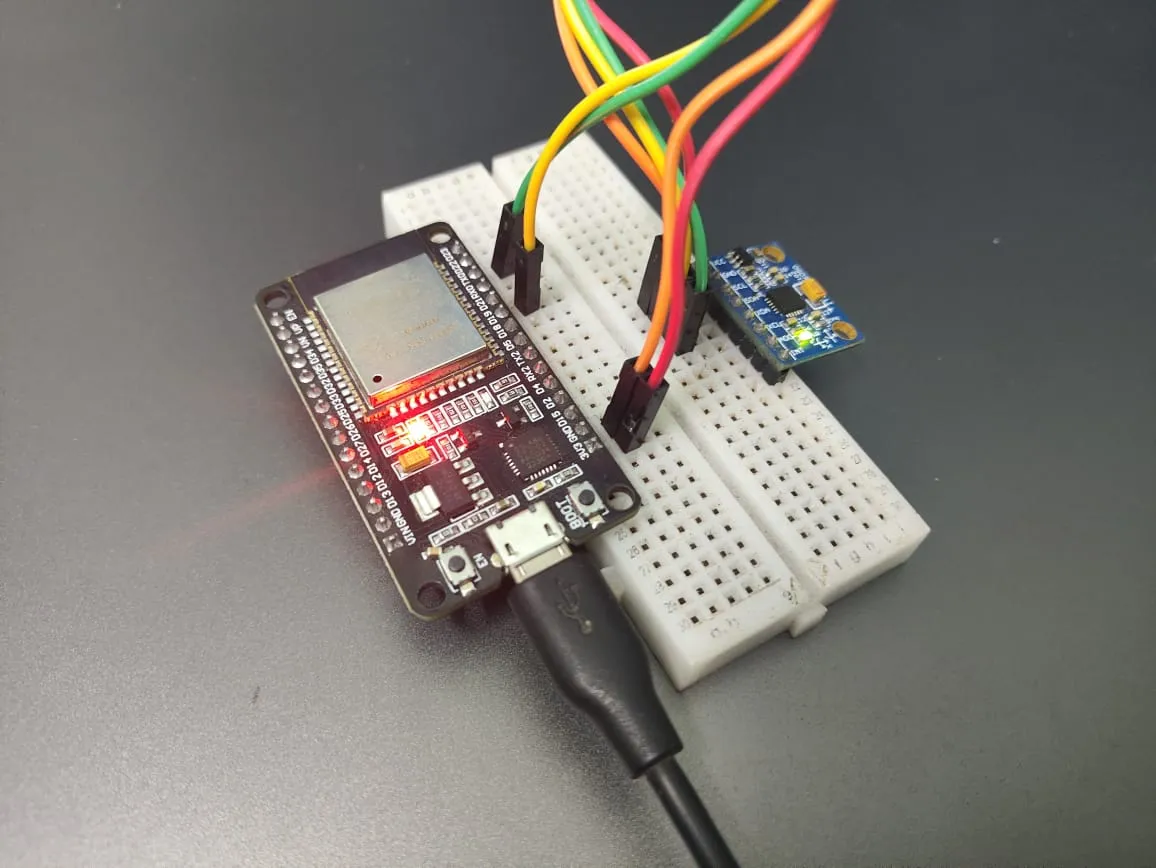
ros2_imu_serial
A ROS2 Humble package to publish IMU (MPU6050) details, connected via serial USB port.
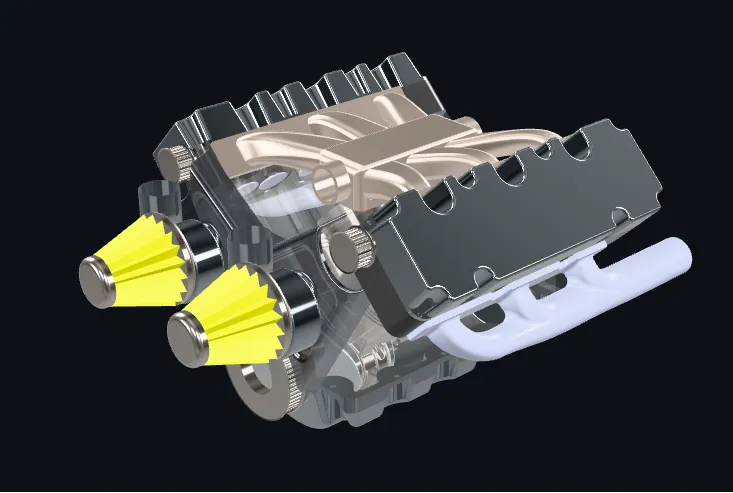
V8 Engine
A fully featured V8 Engine, modelled in Solidworks. Click to see the rendered model!

Logitech Mouse
A Logitech Mouse, modelled with advanced surfacing techniques, modelled in Solidworks. Click to see the rendered model!